三个常用坐标系下的坐标变换和体积元
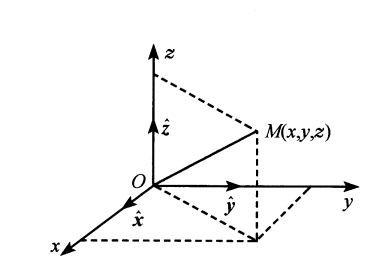
1. 直角坐标系
如图所示,空间中一点 M(x,y,z) 位置由 OM 在三个坐标轴上的投影值 x 、 y 、 z 表示,单位矢量 x^ 、y^、z^,分别表示三个方向,一个矢量 A 可表示为:
A=Axx^+Ayy^+Azz^
A 的大小为
∣A∣=(Ax2+Ay2+Az2)1/2
积分用的体积元
dV=dxdydz
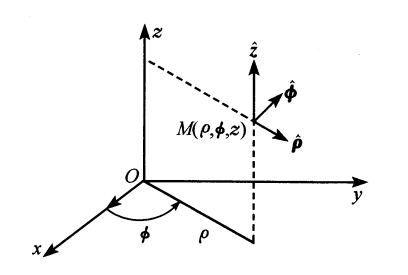
2. 圆柱坐标系
如图所示,空间中一点 M(ρ,ϕ,z),ρ,ϕ 为点 M 在 Oxy 平面上的投影的极坐标 M 到 Oxy 平面的距离,圆柱坐标与直角坐标的互换公式为
⎩⎪⎪⎨⎪⎪⎧x=ρcosϕ,y=ρsinϕ,z=z,⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧ρ=x2+y2ϕ=arctanxyz=z
一个矢量 A 可表示为
A=Aρρ^+Aϕϕ^+Azz^
式中,ρ^ 、ϕ^ 、z^ 是矢量 A 所在空间点的圆柱坐标的单位矢量。
积分用的柱面面积元
dS=ρdϕdz
积分用的体积元
dV=ρdρdϕdz
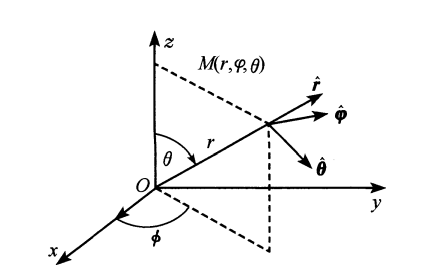
3. 球坐标系
如图所示,空间中一点 M(r,ϕ,θ),r 为 OM 的长度,ϕ 为经度,θ 为纬度。球坐标与直角坐标的互换公式为
⎩⎪⎪⎨⎪⎪⎧x=rsinθcosϕ,y=rsinθsinϕ,z=rcosθ,⎩⎪⎪⎨⎪⎪⎧r=x2+y2+z2ϕ=arctanxyθ=arctanzx2+y2
一个矢量 A 可表示为
A=Arr^+Aϕϕ^+Aθθ^
式中,r^ 、ϕ^ 、θ^ 是矢量 A 所在空间点的球坐标的单位矢量。
积分用的球面面积元
dS=r2sinθdθdϕ
积分用的体积元
dV=r2sinθdrdθdϕ
立体角元
dΩ=r2dS=sinθdθdϕ
矢量代数运算公式
两个矢量的标量积(或称点积、内积)
A⋅B=B⋅A=∣A∣∣B∣cosα
α 是矢量 A 与 B 之间的夹角。标量积又可表示为
A⋅B=AxBx+AyBy+AzBz
两个矢量的矢量积(或称叉积、外积)
A×B=−B×A=∣∣∣∣∣∣∣x^AxBxy^AyByz^AzBz∣∣∣∣∣∣∣=(AyBz−AzBy)x^+(AzBx−AxBz)y^+(AxBy−AyBx)z^
又有
∣A×B∣=∣A∣∣B∣sinα,(0≤α≤π)
A 、B 与 A×B 三个矢量构成右手系,如图所示

三个矢量的混合积
A⋅(B×C)==Ax(ByCz−BzCy)=C⋅(A×B)=B⋅(C×A)∣∣∣∣∣∣∣AxBxCxAyByCyAzBzCz∣∣∣∣∣∣∣+Ay(BzCx−BxCz)+Az(BxCy−ByCx)
混合积是一个数,它的绝对值等于以 A 、B 、 C 为边的平行六面体的体积。
三重矢积
A×(B×C)=B(A⋅C)−C(A⋅B)
在三种坐标系下的矢量分析常用公式
1. 直角坐标系
散度
∇⋅A=divA=∂x∂Ax+∂y∂Ay+∂z∂Az
旋度
∇×A==rotA=∣∣∣∣∣∣∣x^∂x∂Axy^∂y∂Ayz^∂z∂Az∣∣∣∣∣∣∣(∂y∂Az−∂z∂Ay)x^+(∂z∂Ax−∂x∂Az)y^+(∂x∂Ay−∂y∂Ax)z^
梯度
∇Φ=gradΦ=∂x∂Φx^+∂y∂Φy^+∂z∂Φz^
拉普拉斯算符 $\nabla ^2 $ 运算
∇2Φ=∂x2∂2Φ+∂y2∂2Φ+∂z2∂2Φ
2. 圆柱坐标
散度
∇⋅A=ρ1∂ρ∂(ρAρ)+ρ1∂ϕ∂Aϕ+∂z∂Az
旋度
∇×A=(ρ1∂ϕ∂Az−∂z∂Aϕ)ρ^+(∂z∂Aρ−∂ρ∂Az)ϕ^+ρ1[∂ρ∂(ρAϕ)−∂ϕ∂Aρ]z^
梯度
∇Φ=∂ρ∂Φρ^+ρ1∂ϕ∂Φϕ^+∂z∂Φz^
拉普拉斯算符 $\nabla ^2 $ 运算
∇2Φ=ρ1∂ρ∂(ρ∂ρ∂Φ)+ρ21∂ϕ2∂2Φ+∂z2∂2Φ
3. 球坐标
散度
∇⋅A=r21∂r∂(r2Ar)+rsinθ1∂θ∂(Aθsinθ)+rsinθ1∂ϕ∂Aϕ
旋度
∇×A=rsinθ1[∂θ∂(Aϕsinθ)−∂ϕ∂Aθ]r^+r1[sinθ1∂ϕ∂Ar−∂r∂(rAϕ)]θ^+r1[∂r∂(rAθ)−∂θ∂Ar]ϕ^
梯度
∇Φ=∂r∂Φr^+r1∂θ∂Φθ^+rsinθ1∂ϕ∂Φϕ^
拉普拉斯算符 $\nabla ^2 $ 运算
∇2Φ=r21∂r∂(r2∂r∂Φ)+r2sinθ1∂θ∂(sinθ∂θ∂Φ)+r2sin2θ1∂ϕ2∂2Φ
4. ∇ 算符的运算公式
f 和 g 是空间位置的标量函数,A 和 B 是空间位置的矢量函数,则有
∇(f+g)=∇f+∇g∇⋅(A+B)=∇⋅A+∇⋅B∇×(A+B)=∇×A+∇×B∇(fg)=(∇f)g+f(∇g)∇⋅(fA)=(∇f)⋅A+f(∇⋅A)∇×(fA)=(∇f)×A+f(∇×A)∇(A⋅B)=(B⋅∇)A+B×(∇×A)+(A⋅∇)B+A×(∇×B)∇⋅(A×B)=B⋅(∇×A)−A⋅(∇×B)∇×(A×B)=(B⋅∇)A+A(∇⋅B)−(A⋅∇)B−B(∇⋅A)∇×(∇f)=0∇⋅(∇×A)=0∇⋅(∇f)=∇2f
矢量积分的两个公式
1. 高斯公式
∮SA⋅dS=∭V∇⋅AdV
式中,V 为闭合面 S 所围的体积
2. 斯托克斯公式
∮LA⋅dl=∬S(∇×A)⋅dS
参考书籍:《电磁学与电动力学》上册附录 $IV$ ————胡友秋 【科学出版社】(基本上照着抄的属于是)
